Wzory indukcja elektromagnetyczna
| Kategoria | Wzór | Opis Wzoru |
|---|---|---|
| Indukcja Elektromagnetyczna | ||
| Strumień indukcji magnetycznej | \( \Phi_B = \vec{B} \cdot \vec{S} = B S \cos\angle( \vec{B}, \vec{S}) \) | |
Legenda Wzoru:\( \Phi_B \) - Strumień indukcji magnetycznej \( \vec{B} \) - Wektor indukcji magnetycznej \( \vec{S} \) - Wektor powierzchni (prostopadły do powierzchni) \( B \) - Indukcja magnetyczna (magnitude) \( S \) - Powierzchnia, przez którą przepływa pole magnetyczne \( \angle \vec{B}, \vec{S} \) - Kąt między wektorami \( \vec{B} \) i \( \vec{S} \) 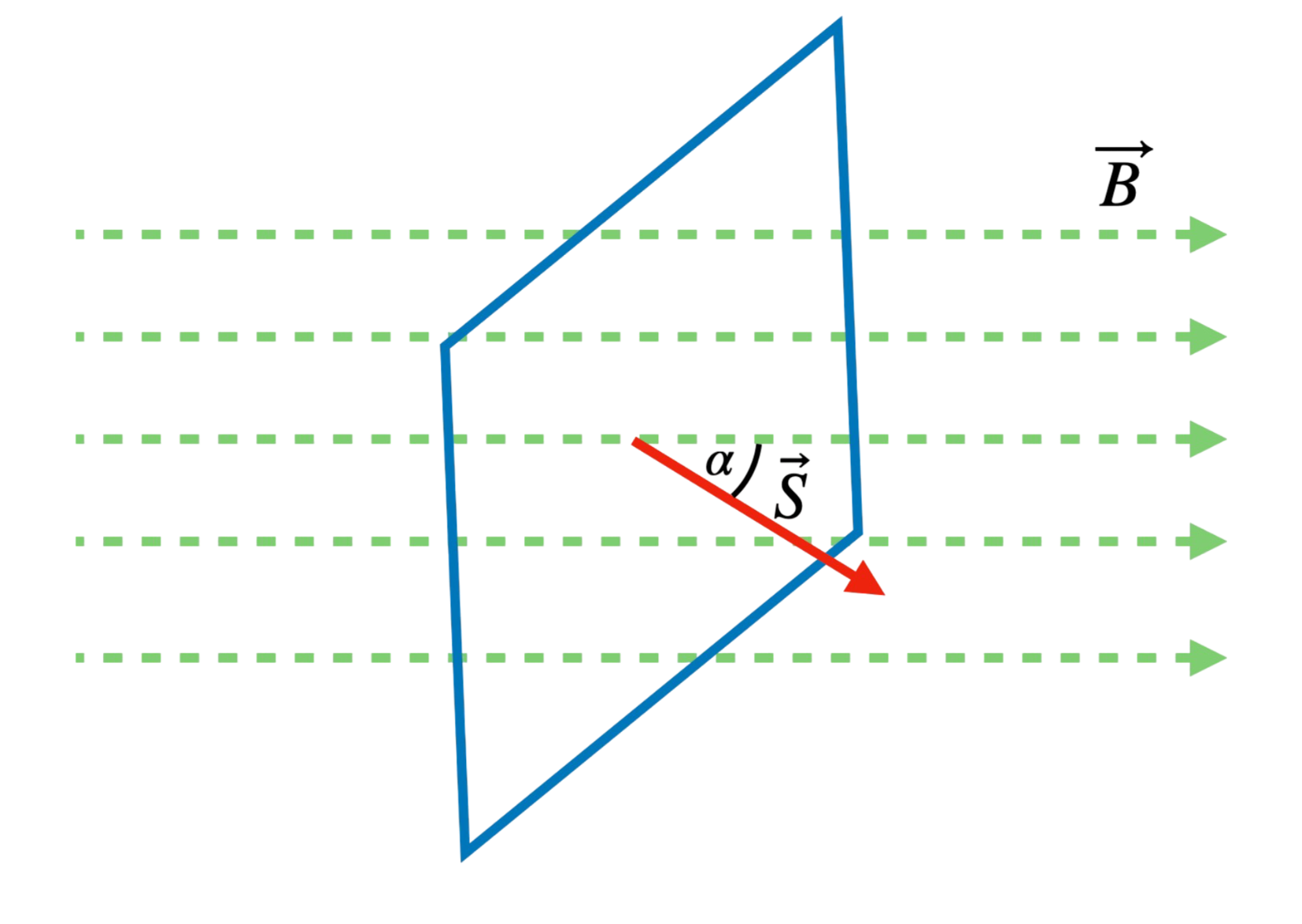
Opis:
Strumień indukcji magnetycznej jest miarą ilości pola magnetycznego przepływającego przez określoną powierzchnię. Wzór ten uwzględnia kąt między wektorem indukcji magnetycznej a wektorem powierzchni, przez którą przepływa pole. |
||
| Prawo Faradaya - Indukcja elektromagnetyczna | \( \mathcal{E} = - \frac{d\Phi}{dt} =- \frac{\Delta \Phi}{\Delta t} \) | |
Legenda Wzoru:\( \mathcal{E} \) - Indukowane napięcie \( \Phi \) - Strumień magnetyczny \( t \) - Czas
Opis:
Prawo Faradaya mówi, że indukowane napięcie w obwodzie jest proporcjonalne do szybkości zmiany strumienia magnetycznego przez ten obwód. |
||
| Prawo Faradaya - Indukcja elektromagnetyczna dla obwodu n zwojów | \( \mathcal{E} = - n \frac{d\Phi_1}{dt} = - n \frac{\Delta \Phi_1}{\Delta t} \) | |
Legenda Wzoru:\( \mathcal{E} \) - Indukowane napięcie \( \Phi_1 \) - Strumień magnetyczny obejmujący jeden zwój \( t \) - Czas \( n \) - Liczba zwojów w obwodzie
Opis:
Prawo Faradaya mówi, że indukowane napięcie w obwodzie o \(n\) zwojach jest proporcjonalne do szybkości zmiany strumienia magnetycznego przez każdy zwój. Dla obwodu z \(n\) zwojami, całkowite indukowane napięcie to \(n\) razy napięcie indukowane w jednym zwoju. |
||
| Indukcja elektromagnetyczna w przewodniku | \( \mathcal{E} = B \cdot v \cdot l \) | |
Legenda Wzoru:\( \mathcal{E} \) - Indukowane napięcie \( B \) - Indukcja magnetyczna \( v \) - Prędkość ruchu przewodnika \( l \) - Długość przewodnika 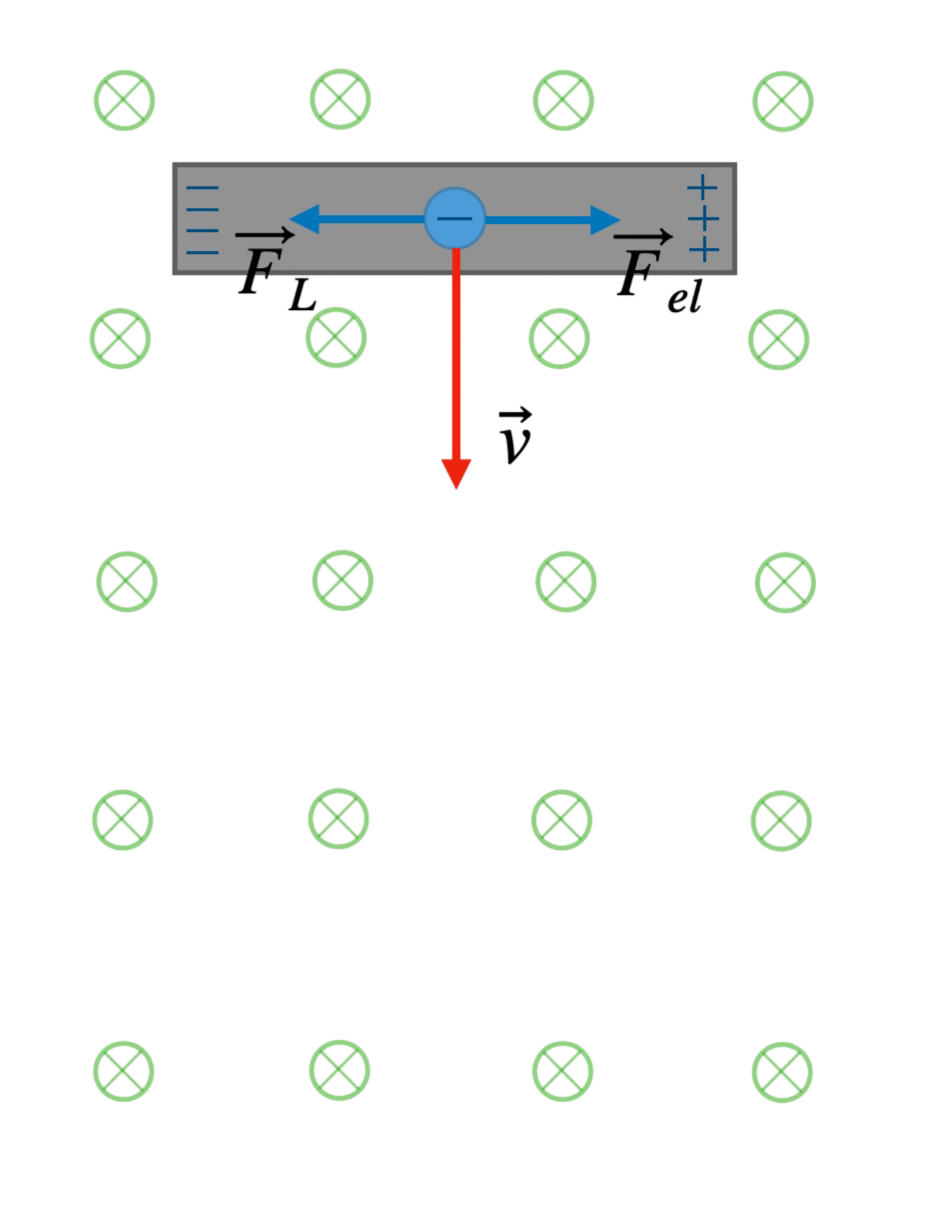
Opis:
Wzór przedstawia indukcję elektromagnetyczną w przewodniku, który porusza się w polu magnetycznym. Napięcie jest proporcjonalne do indukcji magnetycznej, prędkości i długości przewodnika. |
||
| Zjawisko Samoindukcji | ||
| Indukcyjność zwojnic z rdzeniem | \( L = \frac{\mu_0 \mu_r n^2 S}{l} \) | |
Legenda Wzoru:\( L \) - Indukcyjność cewki \( \mu_0 \) - Przenikalność magnetyczna próżni \( \mu_r \) - Przenikalność względna materiału rdzenia \( n \) - Liczba zwojów w cewce \( S \) - Pole przekroju poprzecznego rdzenia \( l \) - Długość rdzenia
Opis:
Wzór ten opisuje indukcyjność cewki z rdzeniem ferromagnetycznym. Indukcyjność cewki wzrasta wraz ze wzrostem liczby zwojów \( n \), powierzchni przekroju poprzecznego rdzenia \( S \) oraz przenikalności magnetycznej rdzenia \( \mu_r \). |
||
| Współczynnik samoindukcji (Indukcyjność) | \( L = \frac{\Phi}{I} \) | |
Legenda Wzoru:\( L \) - Współczynnik samoindukcji (indukcyjność) \( \Phi \) - Strumień magnetyczny \( I \) - Natężenie prądu
Opis:
Wzór ten przedstawia zależność między indukcyjnością cewki a strumieniem magnetycznym \( \Phi \) oraz natężeniem prądu \( I \) przepływającym przez cewkę. Współczynnik samoindukcji mierzy zdolność cewki do generowania strumienia magnetycznego w odpowiedzi na przepływ prądu. |
||
| Siła elektromotoryczna samoindukcji | \( \mathcal{E} = - L \frac{\Delta I}{\Delta t} \) | |
Legenda Wzoru:\( \mathcal{E} \) - Siła elektromotoryczna (SEM) samoindukcji \( L \) - Indukcyjność cewki \( \Delta I \) - Zmiana natężenia prądu \( \Delta t \) - Zmiana czasu
Opis:
Wzór ten przedstawia zależność między siłą elektromotoryczną samoindukcji a zmianą natężenia prądu w czasie. Siła elektromotoryczna samoindukcji jest indukowana w wyniku zmiany prądu w obwodzie i jest proporcjonalna do indukcyjności cewki oraz szybkości zmiany prądu. |
||
| Prąd Zmienny | ||
| Siła elektromotoryczna zwojnicy | \( \mathcal{E} = n B S \omega \sin\angle(\vec{B}, \vec{S}) = n B S \omega \sin(\omega t + \varphi) \) | |
Legenda Wzoru:\( \mathcal{E} \) - Siła elektromotoryczna \( n \) - Liczba zwojów \( B \) - Indukcja magnetyczna (wektor) \( S \) - Powierzchnia zwojnicy (wektor) \( \omega \) - Częstość kątowa \( \angle \vec{B}, \vec{S} \) - Kąt między wektorami \( \vec{B} \) i \( \vec{S} \) \( t \) - Czas \( \varphi \) - Faza początkowa
Opis:
Pierwszy wzór wyraża siłę elektromotoryczną w zwojnicy jako funkcję liczby zwojów, indukcji magnetycznej \( B \), powierzchni \( S \), częstości kątowej \( \omega \), i kąta między wektorami \( B \) i \( S \). Drugi wzór rozwija tę zależność jako funkcję czasu z uwzględnieniem fazy początkowej \( \varphi \). |
||
| Napięcie skuteczne | \( U_{sk} = \frac{U_{max}}{\sqrt{2}} \) | |
Legenda Wzoru:\( U_{sk} \) - Napięcie skuteczne \( U_{max} \) - Maksymalne napięcie
Opis:
Wzór wyraża napięcie skuteczne jako wartość maksymalnego napięcia podzieloną przez pierwiastek z dwóch. |
||
| Natężenie skuteczne | \( I_{sk} = \frac{I_{max}}{\sqrt{2}} \) | |
Legenda Wzoru:\( I_{sk} \) - Natężenie skuteczne \( I_{max} \) - Maksymalne natężenie
Opis:
Wzór wyraża natężenie skuteczne jako wartość maksymalnego natężenia podzieloną przez pierwiastek z dwóch. |
||
| Transformator | ||
| Przekładnia transformatora | \( \frac{n_2}{n_1} \) | |
Legenda Wzoru:\( n_2 \) - Liczba zwojów na stronie wtórnej \( n_1 \) - Liczba zwojów na stronie pierwotnej 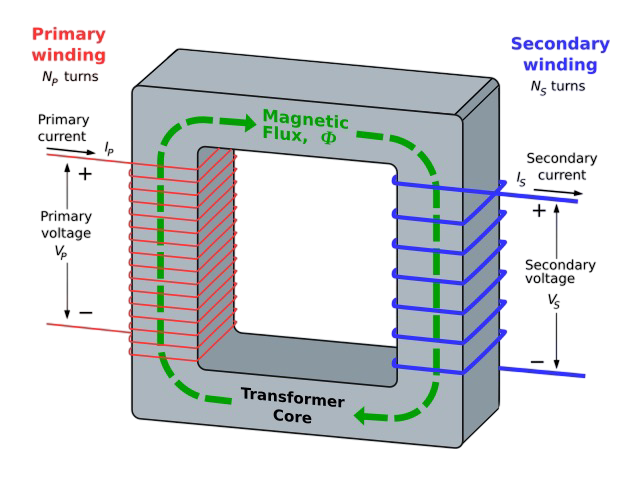
Źródło: BillC
Opis:
Przekładnia transformatora określa stosunek liczby zwojów na stronie wtórnej do liczby zwojów na stronie pierwotnej. Określa to, jak zmienia się napięcie i prąd pomiędzy tymi dwoma obwodami. |
||
| Zależność napięcia (przy braku strat) | \( \frac{U_s}{U_p} = \frac{n_2}{n_1} \) | |
Legenda Wzoru:\( U_s \) - Napięcie na stronie wtórnej \( U_p \) - Napięcie na stronie pierwotnej \( n_2 \) - Liczba zwojów na stronie wtórnej \( n_1 \) - Liczba zwojów na stronie pierwotnej
Źródło: BillC
Opis:
Wzór ten określa zależność napięć na stronie pierwotnej i wtórnej transformatora. Przy braku strat energii, napięcie na stronie wtórnej jest proporcjonalne do napięcia na stronie pierwotnej zgodnie z przekładnią transformatora. |
||
| Zależność prądu (przy braku strat) | \( \frac{U_s}{U_p} = \frac{I_p}{I_s} \) | |
Legenda Wzoru:\( I_s \) - Prąd na stronie wtórnej \( I_p \) - Prąd na stronie pierwotnej \( U_s \) - Napięcie na stronie wtórnej \( U_p \) - Napięcie na stronie pierwotnej
Źródło: BillC
Opis:
Zależność prądów w transformatorze przy założeniu braku strat energii. Wartość prądu na stronie wtórnej jest odwrotnie proporcjonalna do napięcia na stronie wtórnej oraz przekładni transformatora. |
||
Źródło: BillC
Zależność prądów w transformatorze przy założeniu braku strat energii. Wartość prądu na stronie wtórnej jest odwrotnie proporcjonalna do napięcia na stronie wtórnej oraz przekładni transformatora.
{kind=link}